
")
")


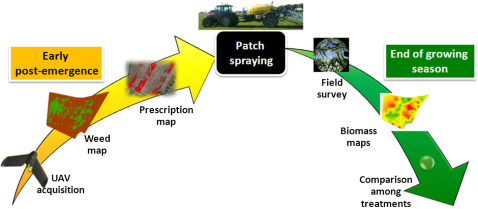
Uno studio condotto nell’ambito del progetto APREINF (Agricoltura di Precisione per la gestione sostenibile delle infestanti) dai ricercatori del CNR-IMAA in collaborazione con i colleghi dell’Università degli studi della Tuscia (Viterbo), mostra come sia possibile ottenere da immagini multispettrali acquisite da droni mappe della copertura delle infestanti e la stima della loro biomassa. La risoluzione spettrale e spaziale dei sensori trasportati dai droni è determinante per una corretta stima.
L’obiettivo del progetto è stato quello di sviluppare e valutare un sistema di gestione del diserbo chimico basato su tecnologie proprie dell’agricoltura di precisione. Sono stati sperimentati due scenari applicativi diversi: (1) un trattamento di diserbo in fase di pre-semina su colture seminate su sodo per il frumento duro, l’orzo, il coriandolo, il girasole e il favino; (2) un diserbo in fase di post-emergenza precoce su mais.
Lo scopo principale è quello di confrontare l’efficacia del trattamento patch-spraying (chiazze) basato sui principi dell’agricoltura di precisione rispetto all’applicazione uniforme del diserbante secondo la pratica convenzionale. A tale scopo sono state impiegate le recenti innovazioni tecnologiche nel settore dell’elettronica applicata al controllo delle macchine agricole (trattore con irroratrice), del telerilevamento (droni) e dei sistemi di posizionamento globale (GPS). Al fine di ottenere un confronto tra le due tipologie di trattamento, sono state effettuate prove in pieno campo secondo uno specifico schema sperimentale, per una corretta interpretazione geostatistica dei dati. Ogni campo è stato suddiviso in 30 parcelle e sono state testate 3 tipologie di trattamento (10 repliche per trattamento): controllo (no diserbo), patch spraying e uniforme (Figura 1a). Le mappe dell'infestazione sono state impiegate per ricavare le cosiddette mappe di prescrizione da utilizzare per l’applicazione del diserbante, con l'indicazione delle aree su cui irrorare, o non irrorare. Le aree da trattare sono state definite sovrapponendo, alla mappa di distribuzione delle infestanti, una griglia regolare di 2 × 2 m e selezionando le celle che presentavano al loro interno una percentuale di copertura di infestanti superiore al 10% (Fig. 1b). Per poter confrontare le diverse modalità di gestione del diserbo, è stato infine sovrapposto uno schema sperimentale con la suddivisione del campo in parcelle di tre tipologie: 1) diserbo uniforme; 2) patch-spraying (usando la mappa di prescrizione); 3) controllo non diserbato.
I risultati ottenuti indicano che in generale è fattibile utilizzare i droni per ottenere mappe delle infestanti. Tuttavia con i sensori multispettrali attualmente diffusi sui droni è difficile ancora distinguere le infestanti dalla coltura o comunque le diverse specie d'infestanti. Per cui, le applicazioni possibili al momento sono in situazione di pre-semina (su semina su sodo) o di emergenza precoce della coltura. Dalle prove effettuate si è visto che l'accuratezza delle mappe dipende molto dalla risoluzione spaziale e spettrale dell'immagine acquisita. Questi risultati evidenziano che la convenienza o meno del diserbo con tecnica di patch-spraying dipende molto dal grado d'infestazione e dalla distribuzione delle infestanti negli appezzamenti. I vantaggi maggiori si avranno quando la presenza delle infestanti è limitata, con una distribuzione a "chiazze" di una dimensione sufficiente per essere rilevabili.
Figura 1 (a, b)
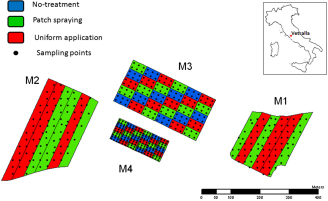
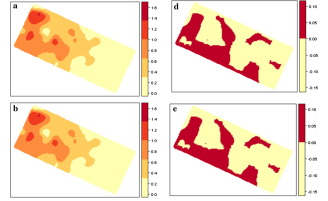
Figura 2
Per informazioni:
Simone Pascucci,CNR-IMAA,simone.pascucci at imaa.cnr.it
Approfondimenti
J.Castaldi, F. Pelosi, S. Pascucci&R. Casa, Assessing the potential of images from unmanned aerial vehicles (UAV) to support herbicide patch spraying in maize, Precision Agriculture, Vol. 17, No. 4, (2016). Digital Object Identifier 10.1007/s11119-016-9468-3






